
发布日期:2023-03-21 11:16 浏览次数:
本标准规定了ISO 6165中定义的土方机械用快速连接装置的安全要求。
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 6165 土方机械 基本类型 识别、术语和定义(Earth-moving machinery-Basic types-Identification and terms and definitions)
ISO 6750 土方机械 司机手册 内容和格式(Earth-moving machinery-Operator's manual-Content and format)
ISO 9244 土方机械 机器安全标签 通则(Earth-moving machinery-Machine safety labels-General principles)
ISO 10968 土方机械 司机的操纵装置(Earth-moving machinery-Operator's controls)
ISO 12100 机械安全 设计通则 风险评估与风险减小(Safety of machinery-Generalprinciples for design-Risk assessment and risk reduction)
ISO 20474-1:2008 土方机械 安全 第1部分:通用要求(Earth-moving machinery-Safety-Part 1:General requirements)
下列术语和定义适用于本文件。
3.1
快速连接装置 quick coupler
安装在土方机械上,用于快速更换附属装置的装置。
注:快速连接装置通常有不同的名称,包括“快速连接”和“连接支架”。在本标准中,仅使用术语“快速连接装置”。
3.1.1
动力快速连接装置 powered quick coupler
啮合和锁定系统中至少有一个部分的动作采用动力驱动的快速连接装置。
示例:液压系统或电机。
3.1.2
手动快速连接装置 manual quick coupler
啮合和锁定系统的动作由人力作用在快速连接装置上驱动的快速连接装置。
3.1.3
混合型快速连接装置 mixed quick coupler
快速连接装置的连接和锁止可在司机室内完成,但是松开需要人力在快速连接装置上操作
3.2
啮合系统 engagement system
与附属装置啮合并将附属装置保持在工作位置的机械系统。
3.2.1
形锁啮合系统 form-locked engagement system
通过至少两个部件将附属装置保持在正常工作位置的啮合系统,这两个部件彼此啮合垂直于工作力以确保工作力不能导致附属装置脱离(见图1)。
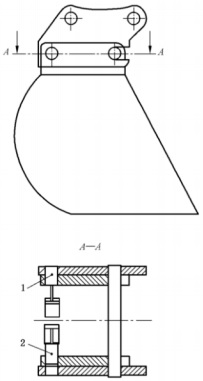
说明:
1——啮合系统处于接合位置;
2——啮合系统处于脱离位置。
图1 形锁啮合系统示例
3.2.2
力锁啮合系统 force-locked engagement system
因工作力沿脱离的方向作用,通过连续施加啮合力保持啮合的啮合系统(见图2)。
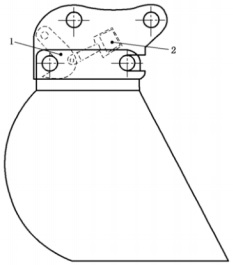
说明:
1——啮合系统;
2——啮合力装置。
图2 力锁啮合系统示例
3.2.3
摩擦啮合系统 friction system
仅依靠摩擦力进行啮合的系统(见图3)。
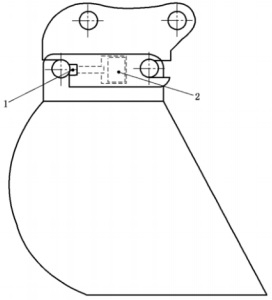
说明:
1——啮合系统;
2——啮合力装置。
图3 摩擦啮合系统示例
以上为标准部分内容,如需看标准全文,请到相关授权网站购买标准正版。
